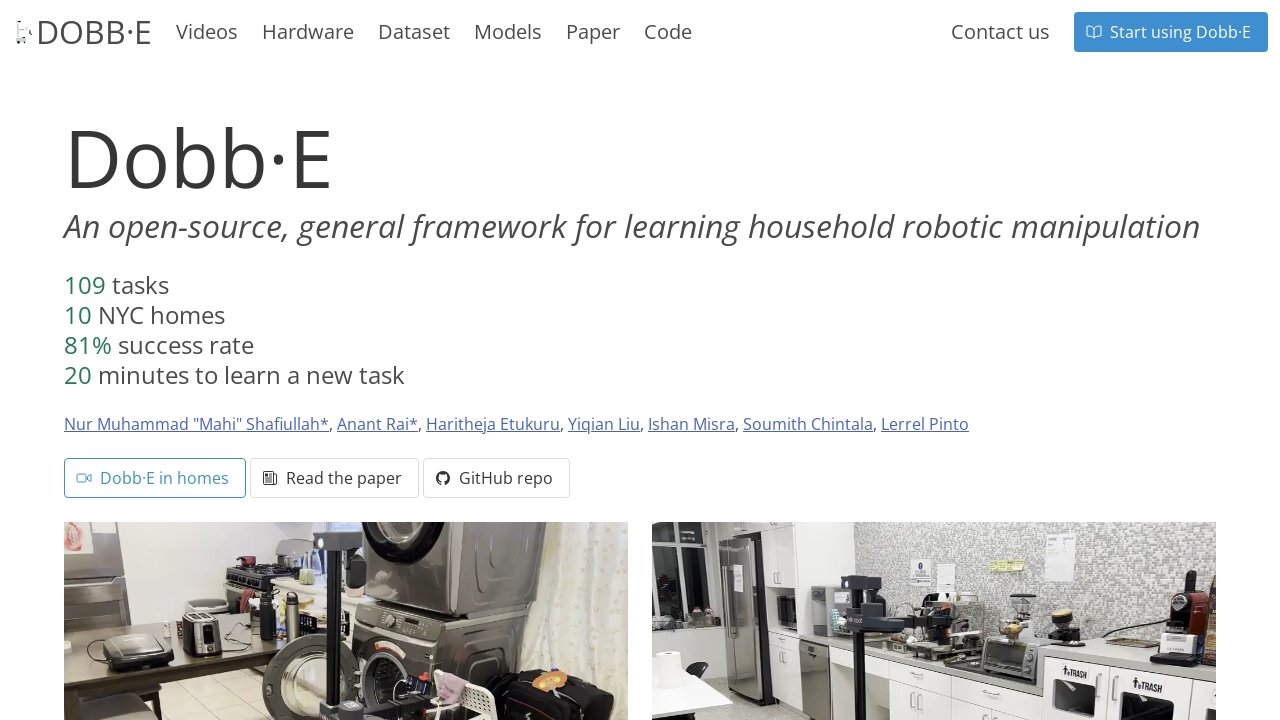
Dobb·E is an open-source, general framework designed for learning household robotic manipulation. It represents a significant step towards integrating versatile, general-purpose robotic systems into domestic settings. Here’s a detailed description of what Dobb·E offers:
Key Features of Dobb·E:
- Versatile Household Robotic System: Dobb·E is designed to adapt and learn from household needs, capable of performing a wide range of tasks within a domestic environment.
- Large-Scale Data Collection: The system was trained using a demonstration collection tool (“The Stick”) built from affordable parts and iPhones, gathering 13 hours of data in 22 homes across New York City.
- High Success Rate: Dobb·E achieved an 81% success rate across 109 tasks in 10 different homes in New York City, demonstrating its effectiveness in diverse environments.
- Rapid Task Learning: The robot can learn a new task with just five minutes of user demonstration, thanks to the Home Pretrained Representations (HPR) model.
- Affordable and Accessible: Dobb·E is designed to be cost-effective, utilizing affordable hardware and open-source software.
- Unique Challenges in Home Robotics: The experiments with Dobb·E revealed unique challenges in home robotics, ranging from dealing with strong shadows to handling variable demonstration quality by non-expert users.
- Open-Source Contribution: In an effort to accelerate research in home robotics, the Dobb·E software stack, models, data, and hardware designs are open-sourced.
- Collaboration and Development: The project involves collaboration among experts and researchers, including Nur Muhammad “Mahi” Shafiullah, Anant Rai, Haritheja Etukuru, Yiqian Liu, Ishan Misra, Soumith Chintala, and Lerrel Pinto.
Ideal for:
- Researchers and developers in the field of robotics looking to explore and contribute to household robotic manipulation.
- Individuals interested in the application of robotics in domestic settings.
- Educational institutions and organizations focusing on robotics and AI research.